
BEECLUST
A simple behavioral algorithm was extracted from observing young honeybees‘ behaviors in temperature fields, e.g. in their natural brood nest regions of their hives. These simple behavioral patterns obviously allow a group of actors to make joint decisions in complex and dynamic search environment. For example the environment might hold one optimal and several suboptimal, but still quite good, places, the agents will still aggregate in the global optimum after some time, until it is saturated with bees and then the second best option will be automatically chosen, until this option is saturated, and so on. This swarm-intelligent algorithm is called BEECLUST, as it is extracted from honeybee behavior and it operates via modulation of cluster binding strength dependent on the environmental quality of the cluster’s locations but also dependent of the densities of agents that participate.
How does BEECLUST work to let a swarm choose a global over several local optima?
-
All robots move simply randomly, there is no need for any individual gradient ascent.
-
If two agents meet (social component!) they both measure the local environmental quality, once.
-
Based on this measure they decide how long they will rest at this place, doing nothing.
-
If the resting time has passed, they turn around (randomly) and continue with step 1
Why do I call the BEECLUST the simplest swarm algorithm that exists?
Because it is extremely simple computation wise and it is characterized by a long list of capabilities that the agents do not need to have, while still being able to solve complex tasks collectively:
-
The agents can move purely randomly, still they will aggregate at the global target zone. No individual gradient detection needed.
-
Not any precise motion is required, the more irregular and noise the motion is, the better it works.
-
The agents need no communication at all, they need just to realize when they (almost) bump into each other, e.g. via a camera.
-
The agents need no map of the environment.
-
The agents need no self-localization of any kind.
-
The agents need no dedicated memory that memorize past measurements, just one internal waiting time clock (e.g., a time counter variable that counts linearly down) is required that is used to know when the resting time is over and motion can start again.
-
The agents need no a-priori knowledge of the environmental qualities that exists.
-
The agents need no ability to individually compare any past visited spots or between spots that are currently visited by other agents.
Why is it significant?
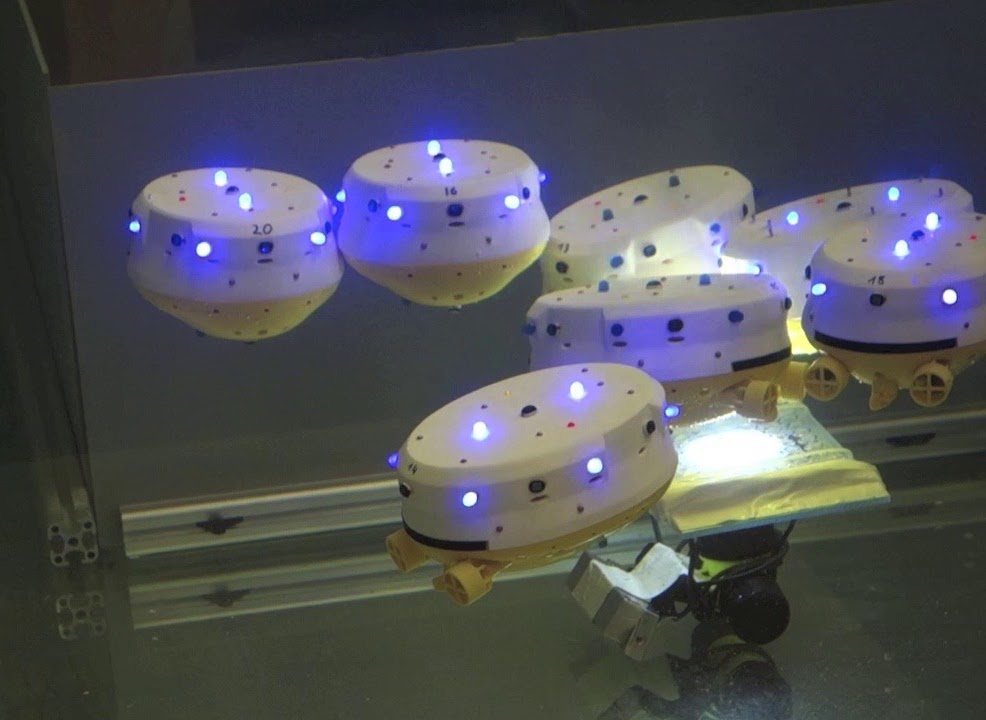
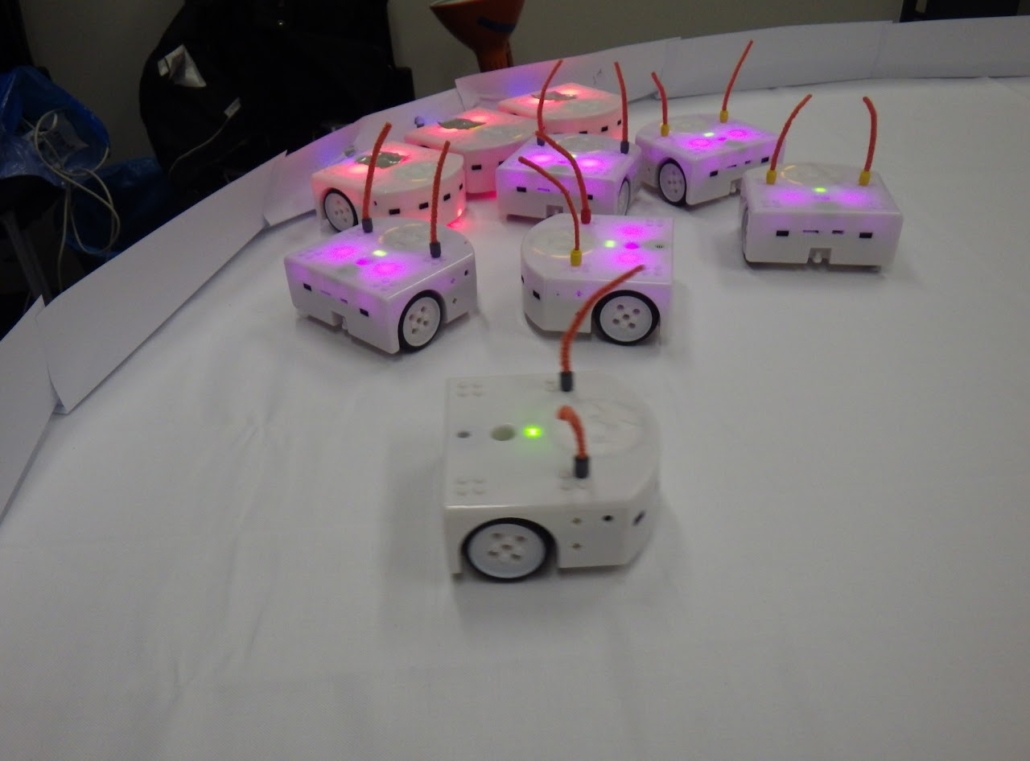
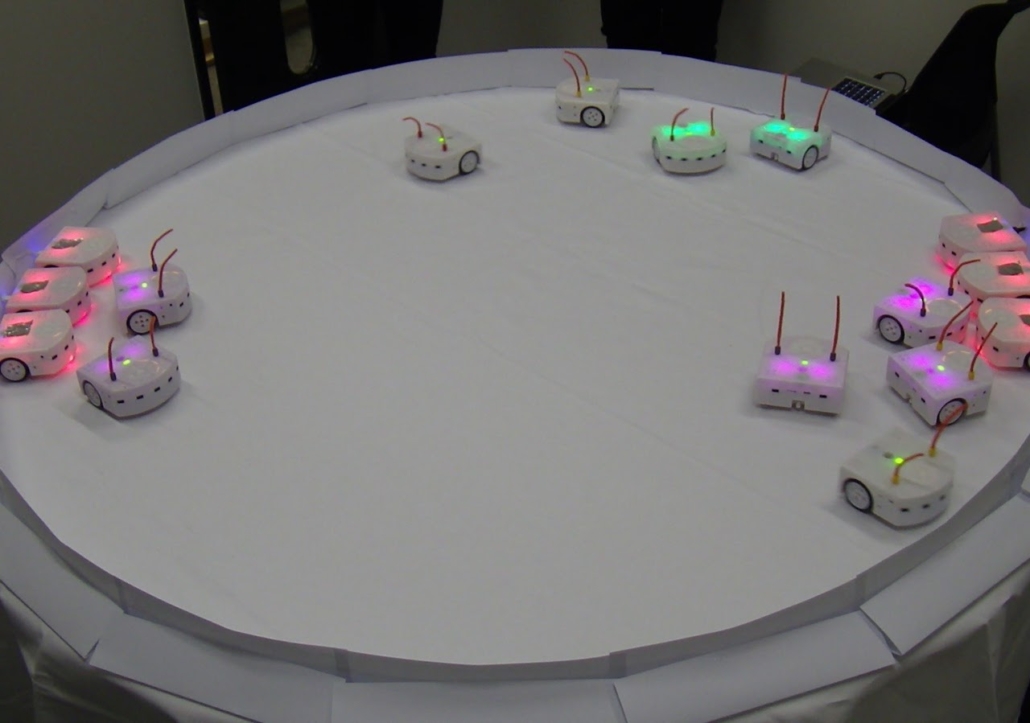
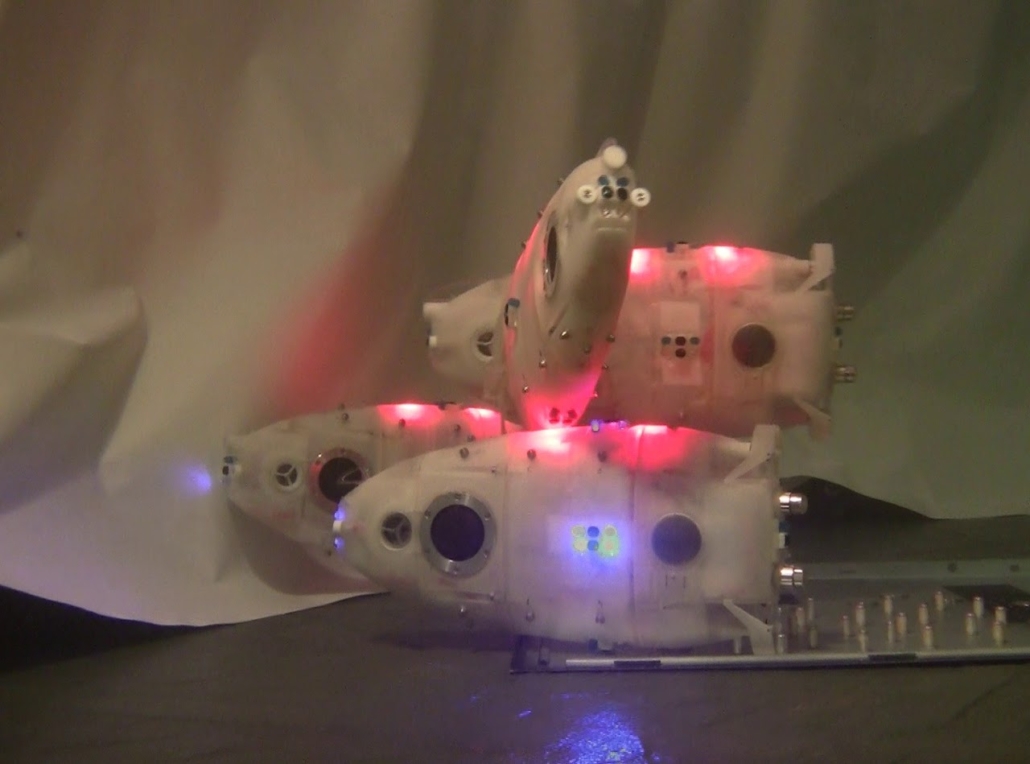
BEECLUST was first deeply analyzed in computer simulations and then implemented in many different robot swarms in order to make collective decisions together and it was found to always pick out the optimal of all possible solutions after some time. This capability is important for many tasks in autonomous robotics, e.g. for searching in complex and dynamic gradients, for mapping the habitat or for robotic self-assembly. The photographs here show only a subset of the robot swarms on which BEECLUST was successfully implemented to seek in very different gradient fields: light gradient fields, temperature gradient fields, water depth fields, magnetic fields in underwater swarms and in land-based robot swarms.



")
")
")


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}